
Being autonomous means being able to estimate the own position and orientation in space. The capability of accomplishing this task and the precision/accuracy achievable determine the potential utilizations of these vehicles. For this reason, it is of paramount importance to develop efficient algorithms to meet the requirements. The range of sensors available nowadays is large and includes also visual aids such as standard cameras or even stereocameras.
Research topics
At the ReTiS Laboratory, there are research activities aimed to the study of these issues. Precisely some research topics consist in
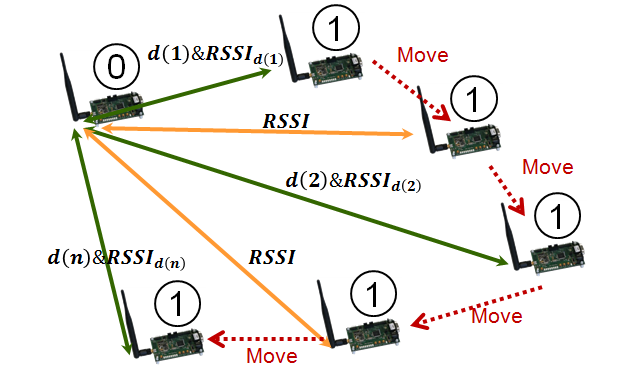
- Localization Techniques using Radio Communication
Teams of mobile cooperative robots are ideal candidates for applications where the presence of humans is impossible or should be avoided. Knowing the positions of the robots is crucial in such scenarios. Occasional situations may allow the building of infrastructure, thus making absolute positions available; however, building infrastructure is costly, and it is probably unavailable in emergency scenarios. GPS may be a possible solution for outdoors; however, it may not be available in locations such as indoor spaces and street canyons. A possible solution is to derive relative positions from local communication.
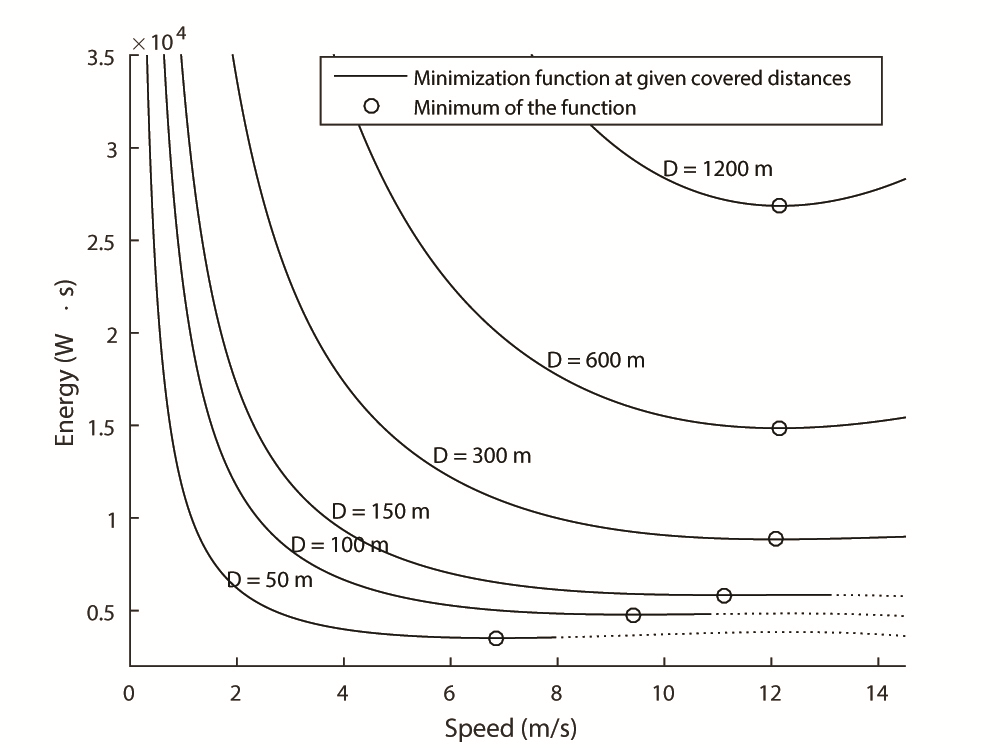
- Energy Guarantees for UAV
Autonomous systems currently self-monitor the status of the battery in order to estimate the available energy and, thus, the remaining autonomy during a mission. However, the type of estimation they perform is too simplistic and does not take into account the dynamic, the current physical position, and the specific task of the vehicle. A more accurate energy model is necessary to enhance safety guarantees and perform energy-aware tasks
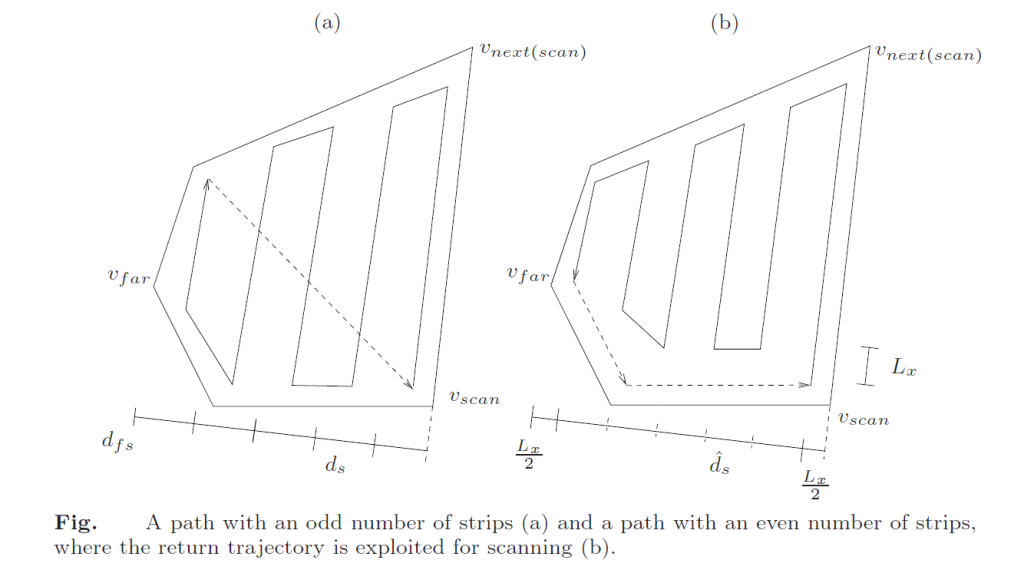
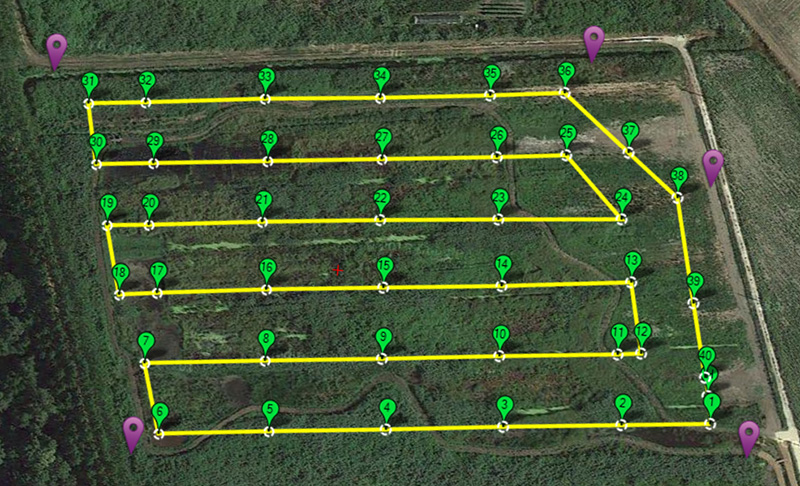
- Coverage Path Planning algorithms
Coverage path planning is the operation of finding a path that covers all the points of a specific area. Thanks to the recent advances in hardware technology, Unmanned Aerial Vehicles (UAVs) are starting to be used for photogrammetric sensing of large areas in several application domains, such as agriculture, rescuing, and surveillance. However, most of the research focused on finding the optimal path, taking only geometrical constraints into account, without considering the peculiar features of the robot, like available energy, weight, maximum speed, sensor resolution, etc.
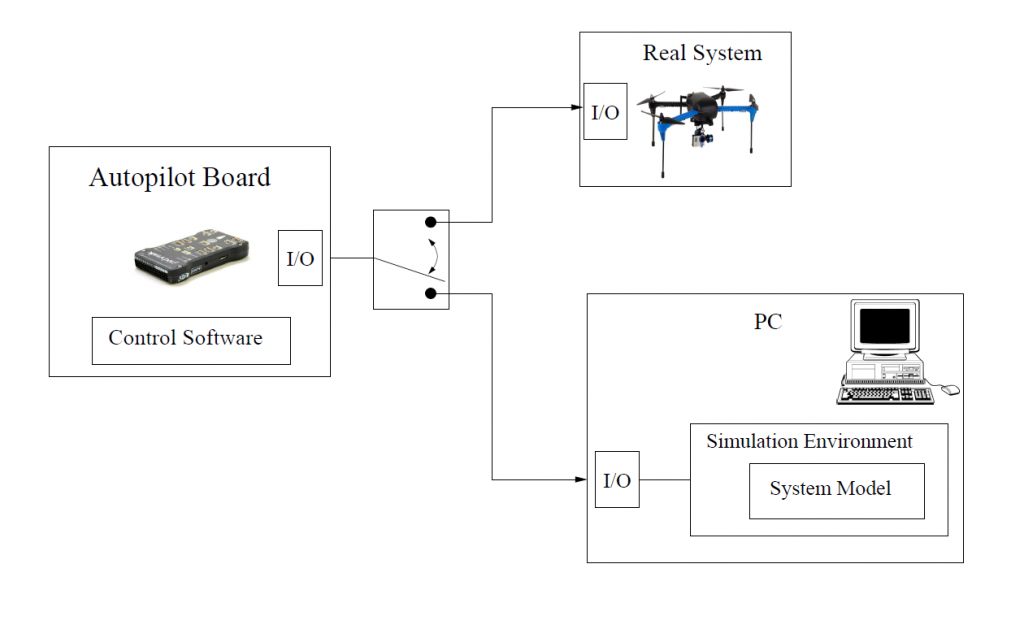
- Hardware in the loop simulation
Given the increasing complexity of these Autonomous Systems, particular importance turns out to be given to the software. Nowadays, the trend is to bring operating systems’ APIs, such as UAVs, into embedded systems. This approach allows the development of solutions with user-friendly support, but it also determines other issues related to safety, real-time constraints of the applications, the efficiency of the code, etc. In this respect, the Retis Laboratory is carrying out studies on several real-time operating systems used for UAV solutions and developing a support framework for developing applications.
- Agriculture robotics: UAVs sensing for bad crop prevention
For the past 50 years, thanks to the benefits produced by technology, the size of the farms increasing and the number of workers per area has been increasing. With the increase of the global population and thus the food demand, we are reaching the limit of cultivable fields. New technologies are needed to increase the production of food and, at the same time, reduce costs. UAVs are starting to be used to monitor the growth of plants, allowing the early discovery of plant infections and leading to the prevention of bad crops. However, due to limited autonomy, there is a need to use a team of drones instead of single units. We work on planning trajectories and detection algorithms specific to agricultural tasks.
Past exploitation projects
- AVIATOR: Autonomous VehIcles In AgriculTuRe AVIATOR: is an innovative project proposed by ReTiSLab and LandLAb of the Scuola Superiore Sant’Anna that aims at using fleets of drones to monitor the growth of plants in farms and finding plant infections on time to prevent bad crops. Using a team of cooperating drones that autonomously take off and inspect the entire field could drastically reduce the costs, preventing extensive use of herbicides and reducing the manual effort of the farmer.

List of the publications
- Luigi Pannocchi, Carmelo Di Franco, Mauro Marinoni, and Giorgio Buttazzo, “Integrated Framework for Fast Prototyping and Testing of Autonomous Systems“, Journal of Intelligent & Robotic Systems, 2019.
- Carmelo Di Franco, Mauro Marinoni, Enrico Bini, and Giorgio C. Buttazzo, “Dynamic Multidimensional Scaling with anchors and height constraints for indoor localization of mobile nodes“, Robotics and Autonomous Systems, Vol.108, 2018.
- Tauã Milech Cabreira, Carmelo Di Franco, Paulo Roberto Ferreira Junior, and Giorgio Buttazzo, “Energy-Aware Spiral Coverage Path Planning for UAV Photogrammetric Applications“, IEEE Robotics and Automation Letters, Vol. 3, Issue 4, pp. 3662-3668, October 2018.
- Tauã Milech Cabreira, Carmelo Di Franco, Paulo Roberto Ferreira Junior, Giorgio Buttazzo “Energy-Aware Spiral Coverage Path Planning for UAV Photogrammetric Applications“, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 1-5, 2018.
- Carmelo Di Franco, Enrico Bini, Mauro Marinoni, and Giorgio Buttazzo, “Multidimensional Scaling Localization with Anchors“, Proceedings of the 17th International Conference on Autonomous Robot Systems and Competitions (ICARSC 2017), Coimbra, Portugal, April 26-30, 2017.
- Luigi Pannocchi, Mauro Marinoni and Giorgio Buttazzo, “Hardware-In-The-Loop Development Framework for Multi-Vehicle Autonomous Systems“, Proceedings of the 17th International Conference on Autonomous Robot Systems and Competitions (ICARSC 2017), Coimbra, Portugal, April 26-30, 2017.
- Carmelo Di Franco and Giorgio Buttazzo, “Coverage Path Planning for UAVs Photogrammetry with Energy and Resolution Constraints“, Journal of Intelligent & Robotic Systems, Vol. 83, Issue 3-4, pp. 445-462, September 2016.
- Carmelo Di Franco and Giorgio Buttazzo, “Energy-aware Coverage Path Planning of UAVs”. Proceedings of the International Conference on Autonomous Robot Systems and Competitions (ICARSC 2015), Villa Real, April 8- 12, 2015.
- Carmelo Di Franco, Alessandra Melani, and Mauro Marinoni, “Solving Ambiguities in MDS Relative Localization”.Proceedings of the 17th International Conference on Advanced Robotics (ICAR 2015). Istanbul (Turkey), July 27-31, 2015
- Carmelo Di Franco, Gianluca Franchino, and Mauro Marinoni, “Data Fusion for Relative Localization of Wireless Mobile Nodes“, Proceedings of the 9th International Symposium on Industrial Embedded Systems (SIES 2014), Pisa, June 18- 20, 2014.
- Luis Oliveira, Carmelo Di Franco, Traian E. Abrudan, and Luis Almeida, “Fusing Time-of-Flight and Received Signal Strength for Adaptive Radio-Frequency Ranging“, Proceedings of the 16th International Conference on Advanced Robotics (ICAR 2013), Montevideo, Uruguay, November 25- 29, 2013.
List of M.Sc. Thesis
- Luigi Pannocchi, “Real-time Software Development for Unmanned Aerial Vehicles”, Tesi di Laurea Magistrale in Ingegneria Robotica e dell’Automazione. Relatore: Giorgio Buttazzo, Scuola Superiore Sant’Anna, September 2015
- Indri Muska, “Sviluppo e simulazione di algoritmi di coordinamento per velivoli autonomi”, Tesi di Laurea in Ingegneria Informatica. Relatore: Giorgio Buttazzo, Scuola Superiore Sant’Anna, Giugno 2014.
- Matteo Tamburini, “Framework per lo sviluppo e la simulazione di algoritmi di controllo per velivoli autonomi”, Tesi di Laurea in Ingegneria Informatica. Relatore: Giorgio Buttazzo, Scuola Superiore Sant’Anna, Giugno 2014.
- Agostino Polizzano, “Strategie e algoritmi di localizzazione per WSN in ambiente indoor basati su misurazioni RSSI”. Tesi di Laurea in Ingegneria Informatica. Relatore: Giorgio Buttazzo, Scuola Superiore Sant’Anna, Luglio 2013.
- Carmelo Di Franco, “Wireless communication services to support teams of cooperating autonomous robots”, Tesi di Laurea in Ingegneria Informatica. Relatore: Giorgio Buttazzo, Scuola Superiore Sant’Anna, Ottobre 2013.
Currently Involved People
- Giorgio Buttazzo, Full Professor
- Mauro Marinoni, Assistant Professor
Past People
- Carmelo Di Franco, PhD Student
- Luigi Pannocchi, PhD Student
- Alessandra Melani, PhD Student
- Indri Muska, MS Student
- Matteo Tamburini, MS Student
- Agostino Polizzano, MS Student